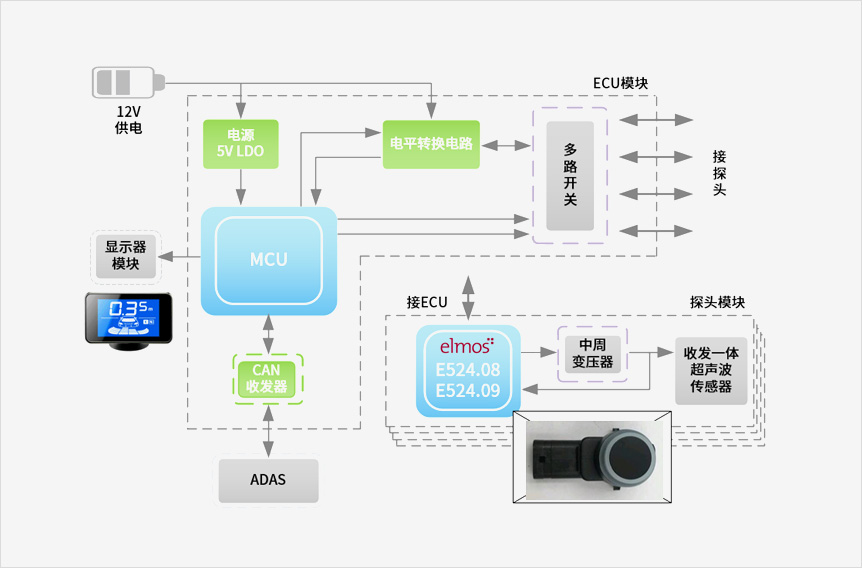
功能(néng)框图
系统分(fēn)為(wèi)ECU和探头两个模块,E524.08/09和ECU通过2線(xiàn)或3線(xiàn)通讯接口完成参数配置、状态读取和距离测量等命令的操作(zuò)。ECU通过发送测量命令通知E524.08/09开始测量。E524.08/09接收到测量命令后,控制收发一體(tǐ)超声波传感器进行超声波的发送和障碍物(wù)回波的接收,芯片对接收的障碍物(wù)回波进行放大、模数转换和数字滤波等信号处理(lǐ)过程后通过通讯接口将数字化的波形反馈给ECU。ECU对收到数字化波形进行距离计算和障碍物(wù)判断等分(fēn)析,从而实现UPAS的所有(yǒu)功能(néng)。
MCU:
负责控制探头的参数配置、距离测量以及系统的其他(tā)应用(yòng),具(jù)體(tǐ)型号请自行选定。
電(diàn)源:
负责提供系统所需電(diàn)源。具(jù)體(tǐ)型号请自行选定。
CAN收发器:
负责将测量结果发送到ADAS的CAN总線(xiàn)上。
推荐:TJA1044
電(diàn)平转换電(diàn)路:
实现MCU和E524.08/09的電(diàn)平转换和電(diàn)平匹配。
推荐:TJA1021
UPAS驱动IC:
实现MCU和E524.08/09的電(diàn)平转换和電(diàn)平匹配。
推荐:E524.08、E524.09